Hallo Leute!
Ich hab etwas leckeres neues für die Brushless Gimbal Freunde unter euch!
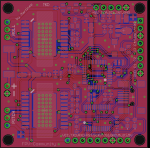
Mit der freundlichen Unterstützung von Nico_99 habe ich einen verbesserten Schaltplan zum Brushless Gimbal Controller entworfen.
Neuerungen:
- 2 SOT23 statt 4 Glasdioden
- Pin Layout optimiert
GND, A1 und A2
GND, Multiport, 5V
- VBUS stabilisiert (USB Port)
- Betriebs LED (blau)
- kleinere LEDs am USB
- 5V besser stabilisiert
- Levershifter am I2C Bus (3.3V auf 5V)
- Pullup verkleinert (für besser Flanken)
Der neue Schaltplan ist zu 100% kompatibel mit der Brushless Gimbal Software von http://brushlessgimbal.de http://code.google.com/p/brushless-gimbal/downloads/list
Das Layout ist auch schon fertig und Leiterplatten werden heute Abend noch bestellt.
Die Maße bleiben bei 50x50mm.
Der Schaltplan und das Layout wird hier unter der TAPR Open Hardware License als Open Source veröffentlicht.
http://www.tapr.org/ohl.html
This schematic and layout is open source: you can redistribute it and/or modify
it under the terms of the TAPR Open Hardware License as published by
the Free Hardware Foundation, either version 1 of the License, or
any later version. see http://www.tapr.org/ohl.html
Alle die bereits auf meiner Warteliste stehen bekommen diese neue Version")

Anhang anzeigen Brushless Gimbal 50x50mm V3.zip
Viele Grüße
Martinez
Ich hab etwas leckeres neues für die Brushless Gimbal Freunde unter euch!
Mit der freundlichen Unterstützung von Nico_99 habe ich einen verbesserten Schaltplan zum Brushless Gimbal Controller entworfen.
Neuerungen:
- 2 SOT23 statt 4 Glasdioden
- Pin Layout optimiert
GND, A1 und A2
GND, Multiport, 5V
- VBUS stabilisiert (USB Port)
- Betriebs LED (blau)
- kleinere LEDs am USB
- 5V besser stabilisiert
- Levershifter am I2C Bus (3.3V auf 5V)
- Pullup verkleinert (für besser Flanken)
Der neue Schaltplan ist zu 100% kompatibel mit der Brushless Gimbal Software von http://brushlessgimbal.de http://code.google.com/p/brushless-gimbal/downloads/list
Das Layout ist auch schon fertig und Leiterplatten werden heute Abend noch bestellt.
Die Maße bleiben bei 50x50mm.
Der Schaltplan und das Layout wird hier unter der TAPR Open Hardware License als Open Source veröffentlicht.
http://www.tapr.org/ohl.html
This schematic and layout is open source: you can redistribute it and/or modify
it under the terms of the TAPR Open Hardware License as published by
the Free Hardware Foundation, either version 1 of the License, or
any later version. see http://www.tapr.org/ohl.html
Alle die bereits auf meiner Warteliste stehen bekommen diese neue Version
Anhang anzeigen Brushless Gimbal 50x50mm V3.zip
Viele Grüße
Martinez
Zuletzt bearbeitet: